前言
RNN及其变种是一代经典,有必要认真学习。在推导了RNN的反向传播算法(BPTT)后,我发现一切反向传播算法都有普遍的规律:误差项都是有从后到前的递推关系的。RNN按时间步递推,其实与DNN中按层递推非常相似。在这里将推导过程记录下来,方便回忆,也希望能给别人一点启发。
1 符号定义及RNN模型结构
1.1 符号定义
下面是详细的符号定义:
| 符号 | 含义 | 维度 |
|---|---|---|
| $\bm{x^{(t)}}$ | 第$t$时刻的输入 | $(K\times 1)$ |
| $\bm{z^{(t)}}$ | 第$t$时刻隐层的带权输入 | $(N\times 1)$ |
| $\bm{h^{(t)}}$ | 第$t$时刻的隐含状态 | $(N\times 1)$ |
| $\bm{s^{(t)}}$ | 第$t$时刻输出层的带权输入 | $(M \times 1)$ |
| $\bm{y^{(t)}}$ | 第$t$时刻的输出 | $(M\times 1)$ |
| $E^{(t)}$ | 第$t$时刻的损失 | 标量 |
| $\bm{U}$ | 隐层对输入的参数,整个模型共享 | $(N\times K)$ |
| $\bm{W}$ | 隐层对状态的参数,整个模型共享 | $(N\times N)$ |
| $\bm{V}$ | 输出层参数,整个模型共享 | $(M\times N)$ |
| $\bm{b}$ | 隐层的偏置,整个模型共享 | $(N\times 1)$ |
| $\bm{c}$ | 输出层偏置,整个模型共享 | $(M\times 1)$ |
| $g()$ | 输出层激活函数 | \ |
| $f()$ | 隐层的激活函数 | \ |
1.2 模型结构
假设有一个时间序列$t=1,2,…,L$,在每一时刻$t$我们有:
\[\begin{aligned} \bm{z^{(t)}}&=\bm{Ux^{(t)}}+\bm{Wh^{(t-1)}}+\bm{b}\\ \bm{h^{(t)}}&=f(\bm{z^{(t)}})\\ \bm{s^{(t)}}&=\bm{Vh^{(t)}}+\bm{c}\\ \bm{y^{(t)}}&=g(\bm{s^{(t)}}) \end{aligned}\]这就是RNN的结构。可以看到,每一时刻$t$的隐含状态$\bm{h^{(t)}}$ 都是由当前时刻的输入$\bm{x^{(t)}}$ 和上一时刻的隐含状态$\bm{h^{(t-1)}}$ 共同得到的。
以下是RNN中所有时间步共用$\bm{W}$和$\bm{U}$的解释:
从多层网络出发到循环网络,我们需要利用20世纪80年代机器学习和统计模型早期思想的优点:在模型的不同部分共享参数。参数共享使得模型能够扩展到不同形式的样本(这里指不同长度的样本)并进行泛化。如果我们在每个时间点上都有一个单独的参数,不但不能泛化到训练时没有见过的序列长度,也不能在时间上共享不同序列长度和不同位置的统计强度。(From Goodfellow:序列建模)
2 沿时间的反向传播算法
2.1 总体分析
首先快速总览一下RNN的全部流程。
- 首先令模型的隐含状态$\bm{h^{(0)}=0}$。
- 每一时刻$\bm{t}$的输入$\bm{x^{(t)}}$ 都是一个向量(比如:在NLP中,可以使用词向量),在经过模型后会得到这一时刻的状态$\bm{h^{(t)}}$ 和输出$\bm{y^{(t)}}$。
- 在NLP中,$\bm{y^{(t)}}$是由$\bm{s^{(t)}}$经过$g$ (通常为Softmax) 激活得到的,搭配Cross Entropy Loss (比如:在词表中挑选下一个单词,这是一个分类问题) ,就能计算出此刻的损失$E^{(t)}$。
- 计算出$E^{(t)}$后,并不能立即对模型参数进行更新。需要沿着时间$t$不断给出输入,计算出所有时刻的损失。模型总损失为$E=\sum_tE^{(t)}$
- 我们需要根据总损失$E$计算所有参数的梯度$\frac{\partial E}{\partial \bm{U}},\frac{\partial E}{\partial \bm{W}},\frac{\partial E}{\partial \bm{V}},\frac{\partial E}{\partial \bm{b}},\frac{\partial E}{\partial \bm{c}}$,再使用基于梯度的优化方法进行参数更新。
这就是一轮完整的流程,本文要讨论的就是:如何计算RNN模型参数的梯度。
2.2 求$\frac{\partial E}{\partial \bm{V}}$
\[\frac{\partial E}{\partial \bm{V}}=\sum_t\frac{\partial E^{(t)}}{\partial \bm{V}}\]由公式 $\bm{s^{(t)}}=\bm{Vh^{(t)}}+\bm{c}$ 和 $\bm{y^{(t)}}=g(\bm{s^{(t)}})$,很容易有:
\[\begin{aligned} \frac{\partial E^{(t)}}{\partial V_{ij}}&=\frac{\partial E^{(t)}}{\partial s_i^{(t)}}\frac{\partial s_i^{(t)}}{\partial V_{ij}}\tag{a}\\ &=\frac{\partial E^{(t)}}{\partial y_i^{(t)}}\frac{\partial y_i^{(t)}}{\partial s_i^{(t)}}\frac{\partial s_i^{(t)}}{\partial V_{ij}}\\ &=\frac{\partial E^{(t)}}{\partial y_i^{(t)}}g'(s_i^{(t)})h_j^{(t)} \end{aligned}\]推广到矩阵形式,即:
\[\frac{\partial E}{\partial \bm{V}}=\sum_t[\frac{\partial E^{(t)}}{\partial \bm{y^{(t)}}}\odot g'(\bm{s^{(t)}})](\bm{h^{(t)}})^\mathrm{T}\tag{1}\]
2.3 求$\frac{\partial E}{\partial \bm{U}}$
\[\frac{\partial E}{\partial \bm{U}}=\sum_t(\frac{\partial E}{\partial \bm{U}})^{(t)}\]细心的人会发现,与之前 ($\frac{\partial E}{\partial \bm{V}}=\sum_t\frac{\partial E^{(t)}}{\partial \bm{V}}$) 不同,这次的 时间上标$^{(t)}$ 加在了括号外面。简单说一下原因:由于$\bm{V}$在输出层,所以它在每一时刻的梯度只与当前时刻的损失 $E^{(t)}$ 有关。但$\bm{U}$和$\bm{W}$在隐藏层,参与到了下一时刻的运算。在求它们每一时刻的梯度时,要使用总损失 $E$ 来表示。关于为什么求和项仍成立,可以参考此文章中的“数学公式超高能预警”部分,下同。
观察公式 $\bm{z^{(t)}}=\bm{Ux^{(t)}}+\bm{Wh^{(t-1)}}+\bm{b}$ 和 $\bm{h^{(t)}}=f(\bm{z^{(t)}})$,有:
\[\begin{aligned} (\frac{\partial E}{\partial U_{ij}})^{(t)}&=\frac{\partial E}{\partial z_i^{(t)}}\frac{\partial z_i^{(t)}}{\partial U_{ij}}\tag{b}\\ &=\frac{\partial E}{\partial z_i^{(t)}}x_j^{(t)} \end{aligned}\]计算$\frac{\partial E}{\partial z_i^{(t)}}$这一项时,就需要仔细观察一下了。由于RNN的特性:计算$\bm{h^{(t)}}$时,同时需要 $\bm{x^{(t)}}$ 和 $\bm{h^{(t-1)}}$。所以 $\bm{z^{(t)}}$ 不仅会对当前时刻的输出造成影响,也会影响到下一时刻的输出,变量间具体的依赖关系如下图所示:
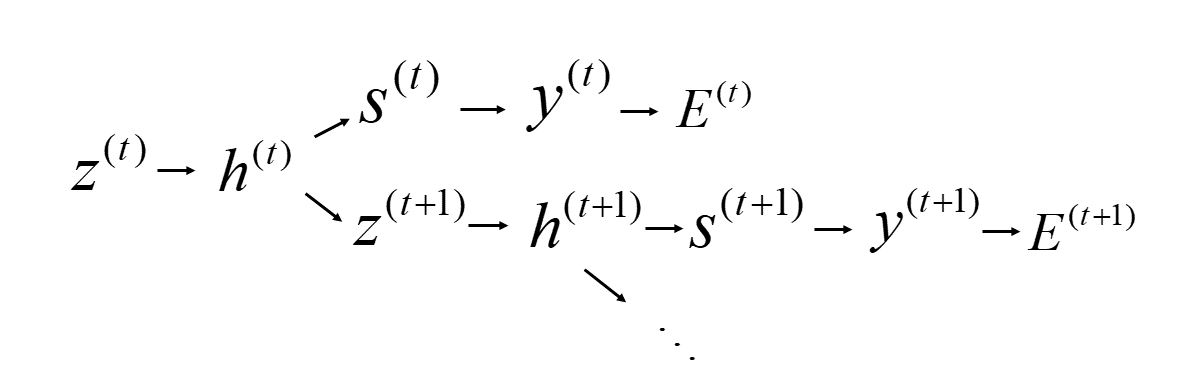
所以,$\frac{\partial E}{\partial z_i^{(t)}}$ 应该包含两部分:
\[\frac{\partial E}{\partial z_i^{(t)}}=\frac{\partial E^{(t)}}{\partial \bm{s^{(t)}}}\frac{\partial \bm{s^{(t)}}}{\partial z_i^{(t)}}+\frac{\partial E}{\partial \bm{z^{(t+1)}}}\frac{\partial \bm{z^{(t+1)}}}{\partial z_i^{(t)}}\]前半部分:
\[\begin{aligned} &=\frac{\partial E^{(t)}}{\partial \bm{s^{(t)}}}\frac{\partial \bm{s^{(t)}}}{\partial z_i^{(t)}}\\ &=\sum_k \frac{\partial E^{(t)}}{\partial s_k^{(t)}}\frac{\partial s_k^{(t)}}{\partial z_i^{(t)}}\\ &=\sum_k \frac{\partial E^{(t)}}{\partial s_k^{(t)}}\frac{\partial s_k^{(t)}}{\partial h_i^{(t)}}\frac{\partial h_i^{(t)}}{\partial z_i^{(t)}}\\ &=\sum_k \frac{\partial E^{(t)}}{\partial s_k^{(t)}}V_{ki}f'(z_i^{(t)}) \end{aligned}\]后半部分:
\[\begin{aligned} &=\frac{\partial E}{\partial \bm{z^{(t+1)}}}\frac{\partial \bm{z^{(t+1)}}}{\partial z_i^{(t)}}\\ &=\sum_k \frac{\partial E}{\partial z_k^{(t+1)}}\frac{\partial z_k^{(t+1)}}{\partial z_i^{(t)}}\\ &=\sum_k \frac{\partial E}{\partial z_k^{(t+1)}}\frac{\partial z_k^{(t+1)}}{\partial h_i^{(t)}}\frac{\partial h_i^{(t)}}{\partial z_i^{(t)}}\\ &=\sum_k \frac{\partial E}{\partial z_k^{(t+1)}}W_{ki}f'(z_i^{(t)}) \end{aligned}\]带入原式,得到:
\[(\frac{\partial E}{\partial U_{ij}})^{(t)}=[\sum_k^M \frac{\partial E^{(t)}}{\partial s_k^{(t)}}V_{ki}+\sum_k^N \frac{\partial E}{\partial z_k^{(t+1)}}W_{ki}]\cdot f'(z_i^{(t)})\cdot x_j^{(t)}\]引入误差记号,记 $\bm{\delta_y^{(t)}}=\frac{\partial E^{(t)}}{\partial \bm{s^{(t)}}},\bm{\delta_h^{(t)}}=\frac{\partial E}{\partial \bm{z^{(t)}}}$ 。再次提醒:某一时刻关于$\bm{s}$的误差只与当前时刻的损失有关,而关于$\bm{z}$的误差与后面的所有损失都有关。所以,还有以下关系:
\[\begin{aligned} \bm{\delta_y^{(t)}}&=\frac{\partial E}{\partial \bm{s^{(t)}}}=\frac{\partial E^{(t)}}{\partial \bm{s^{(t)}}}\\ \bm{\delta_h^{(t)}}&=\frac{\partial E}{\partial \bm{z^{(t)}}}\not ={}\frac{\partial E^{(t)}}{\partial \bm{z^{(t)}}} \end{aligned}\]
上式可改写为:
\[(\frac{\partial E}{\partial U_{ij}})^{(t)}=[\sum_k^M \delta_{y,k}^{(t)}V_{ki}+\sum_k^N \delta_{h,k}^{(t+1)}W_{ki}]\cdot f'(z_i^{(t)})\cdot x_j^{(t)}\]推广到矩阵形式,即:
\[\frac{\partial E}{\partial \bm{U}}=\sum_t [(\bm{V}^\mathrm{T}\bm{\delta_y^{(t)}}+\bm{W}^\mathrm{T}\bm{\delta_h^{(t+1)}})\odot f'(\bm{z^{(t)}})]\cdot \bm{x^{(t)}}\tag{2}\]
2.4 求$\frac{\partial E}{\partial \bm{W}}$
\[\frac{\partial E}{\partial \bm{W}}=\sum_t(\frac{\partial E}{\partial \bm{W}})^{(t)}\]观察公式 $\bm{z^{(t)}}=\bm{Ux^{(t)}}+\bm{Wh^{(t-1)}}+\bm{b}$ ,有:
\[\begin{aligned} (\frac{\partial E}{\partial W_{ij}})^{(t)}&=\frac{\partial E}{\partial z_i^{(t)}}\frac{\partial z_i^{(t)}}{\partial W_{ij}}\tag{c}\\ &=\frac{\partial E}{\partial z_i^{(t)}}h_j^{(t-1)} \end{aligned}\]可以发现公式$c$与公式$b$形式基本相同。所以很容易直接得出$\frac{\partial E}{\partial \bm{W}}$的矩阵形式:
\[\frac{\partial E}{\partial \bm{W}}=\sum_t [(\bm{V}^\mathrm{T}\bm{\delta_y^{(t)}}+\bm{W}^\mathrm{T}\bm{\delta_h^{(t+1)}})\odot f'(\bm{z^{(t)}})]\cdot \bm{h^{(t-1)}}\tag{3}\]
2.4 引入$\bm{\delta_y^{(t)}}$与$\bm{\delta_h^{(t)}}$后发生了什么
之前我们一直在老老实实、循规蹈矩的计算参数的梯度。但回过头来重新审视一下公式$(a),(b),(c)$,会有一个惊人的发现:
其实我们并不需要推导到最后。
因为在$(a),(b),(c)$的第一行,早已经有了$\bm{\delta_y^{(t)}}$与$\bm{\delta_h^{(t)}}$的形式!我们只需要直接将其转化为矩阵表示就可以了。
所以,我们重写$\frac{\partial E}{\partial \bm{V}},\frac{\partial E}{\partial \bm{W}},\frac{\partial E}{\partial \bm{U}}$:
\[\begin{aligned} \frac{\partial E}{\partial \bm{V}}&=\sum_t\frac{\partial E^{(t)}}{\partial \bm{s^{(t)}}}(\bm{h^{(t)}})^\mathrm{T}=\sum_t\bm{\delta_y^{(t)}}(\bm{h^{(t)}})^\mathrm{T}\\ \frac{\partial E}{\partial \bm{U}}&=\sum_t\frac{\partial E}{\partial \bm{z^{(t)}}}(\bm{x^{(t)}})^\mathrm{T}=\sum_t\bm{\delta_h^{(t)}}(\bm{x^{(t)}})^\mathrm{T}\\ \frac{\partial E}{\partial \bm{W}}&=\sum_t\frac{\partial E}{\partial \bm{z^{(t)}}}(\bm{h^{(t-1)}})^\mathrm{T}=\sum_t\bm{\delta_h^{(t)}}(\bm{h^{(t-1)}})^\mathrm{T} \end{aligned}\]
所以说推导到最后,我们一切都白干了吗?
当然不是。
对比上式和$(1),(2),(3)$,我们可以找出$\bm{\delta_y^{(t)}}$与$\bm{\delta_h^{(t)}}$的计算方法:
\[\begin{aligned} \bm{\delta_y^{(t)}}&=\frac{\partial E^{(t)}}{\partial \bm{y^{(t)}}}\odot g'(\bm{s^{(t)}})\\ \bm{\delta_h^{(t)}}&=(\bm{V}^\mathrm{T}\bm{\delta_y^{(t)}}+\bm{W}^\mathrm{T}\bm{\delta_h^{(t+1)}})\odot f'(\bm{z^{(t)}}) \end{aligned}\]当然,如果使用$\mathrm{Softmax+CrossEntropy Loss}$这个组合,那么$\bm{\delta_y^{(t)}}$的形式会更为简洁。另外,我们可以看到$\bm{\delta_h^{(t)}}$这一项是可以递推计算的,这与DNN反向传播中的$\bm{\delta^l}$类似。所以,我们还需要计算最后一个时刻$L$的$\bm{\delta_h^{(L)}}$。因为他没有后一个递推项$\bm{\delta_h^{(L+1)}}$了,所以可以直接简化为:
\[\bm{\delta_h^{(L)}}=(\bm{V}^\mathrm{T}\bm{\delta_y^{(L)}})\odot f'(\bm{z^{(L)}})\]在最后,再补上$\frac{\partial E}{\partial \bm{b}}$ 和 $\frac{\partial E}{\partial \bm{c}}$ 的推导:
\[\begin{aligned} \frac{\partial E}{\partial \bm{b}}=\sum_t(\frac{\partial E}{\partial \bm{b}})^{(t)}=\sum_t\frac{\partial E}{\partial \bm{z^{(t)}}}\frac{\partial \bm{z^{(t)}}}{\partial \bm{b}}=\sum_t\frac{\partial E}{\partial \bm{z^{(t)}}}=\sum_t\bm{\delta_h^{(t)}}\\ \frac{\partial E}{\partial \bm{c}}=\sum_t\frac{\partial E^{(t)}}{\partial \bm{c}}=\sum_t\frac{\partial E^{(t)}}{\partial \bm{s^{(t)}}}\frac{\partial \bm{s^{(t)}}}{\partial \bm{c}}=\sum_t\frac{\partial E^{(t)}}{\partial \bm{s^{(t)}}}=\sum_t\bm{\delta_y^{(t)}} \end{aligned}\]
2.5 总结
总结下模型参数梯度的计算和更新流程,深刻感受下BPTT的魅力。
- 固定所有模型参数
- 依次走过$L$个时刻,记录每一时刻的$\bm{x^{(t)}}$和$\bm{h^{(t)}}$,并得到每一时刻的损失$E^{(1)},E^{(2)},…E^{(L)}$,进而得到每一时刻的$\bm{\delta_y^{(1)}},\bm{\delta_y^{(2)}},…,\bm{\delta_y^{(L)}}$
- 得到$\bm{\delta_y^{(L)}}$后,便可计算$\bm{\delta_h^{(L)}}$,进而递推向前计算每一时刻的$\bm{\delta_h^{(t)}}$
- 得到所有$\bm{\delta_h^{(t)}}$后,便可计算所有模型参数的梯度
- 更新所有模型参数